

Adam Glanzmann
MIT-ingenieurs hebben een draadloze onderwatercamera zonder batterij gebouwd, die in staat is om zelf stroom op te bouwen terwijl hij heel weinig stroom verbruikt, volgens nieuw papier Gepubliceerd in Nature Communications. Het systeem kan op afstand kleurenbeelden van ondergedompelde objecten vastleggen – zelfs op donkere plaatsen – en draadloos gegevens verzenden voor realtime monitoring van onderwateromgevingen, wat helpt bij de ontdekking van nieuwe zeldzame soorten, monitoring van oceaanstromingen, vervuiling of commerciële en militaire operaties .
We hebben al verschillende manieren om onderwaterfoto’s te maken, maar volgens de auteurs zijn “de meeste zee- en oceaanwezens nog niet waargenomen.” Dit komt deels omdat de meeste huidige methoden vereisen dat ze worden aangesloten op schepen, onderwaterdrones of energiecentrales voor zowel stroom als communicatie. De methoden die geen gebruik maken van tethering, moeten batterijvoeding bevatten, wat de levensduur ervan beperkt. Hoewel het in principe mogelijk is om energie te winnen uit oceaangolven, onderwaterstromingen of zelfs zonlicht, zou het toevoegen van de benodigde apparatuur resulteren in een veel grotere en duurdere onderwatercamera.
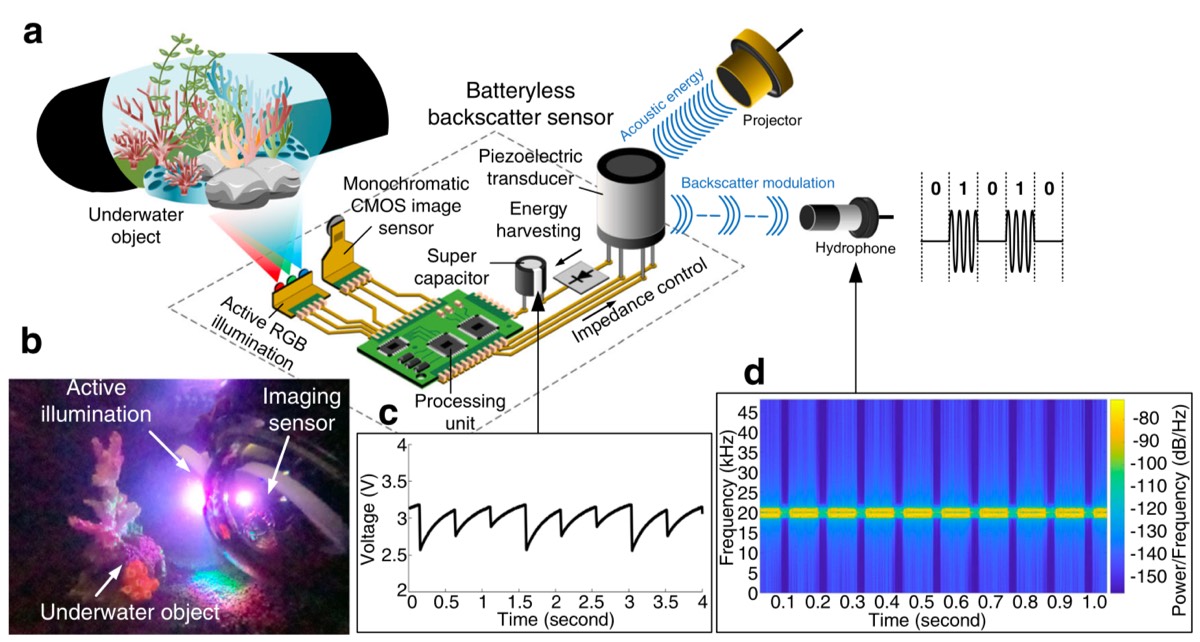
Dus ging het MIT-team op zoek naar een oplossing voor een batterijloze draadloze beeldvormingsmethode. Het ontwerpdoel was om de benodigde hardware zoveel mogelijk te verminderen. Omdat ze bijvoorbeeld het stroomverbruik tot een minimum wilden beperken, gebruikte het MIT-team goedkope kant-en-klare beeldsensoren. De wisselwerking is dat deze sensoren alleen grijswaardenbeelden produceren. Het team moest ook een flits met laag vermogen ontwikkelen, aangezien de meeste onderwateromgevingen niet veel natuurlijk licht krijgen.
SS Afzal et al., 2022
Het blijkt dat de oplossing voor beide uitdagingen rode, groene en blauwe LED’s is. De camera gebruikt een rode LED om de locatie te verlichten en legt dat beeld vast met zijn sensoren, en herhaalt het proces met de groene en blauwe LED’s. Het beeld ziet er misschien zwart-wit uit, zeggen de auteurs, maar de drie kleuren licht van de LED’s worden weerspiegeld in het witte gedeelte van elk beeld. Zo kan tijdens de nabewerking een full colour beeld worden gereconstrueerd.
“Toen we kinderen waren in de tekenles, werd ons geleerd dat we alle kleuren kunnen maken met drie primaire kleuren,” Co-auteur Fadel Adeeb zei:. “Het volgt dezelfde regels voor de kleurenafbeeldingen die we op onze computers zien. We hebben alleen rood, groen en blauw nodig – deze drie kanalen – om kleurenafbeeldingen te maken.”
In plaats van een batterij vertrouwt de sensor op piëzo-akoestische terugverstrooiing voor communicatie met zeer laag vermogen nadat de beeldgegevens als bits zijn gecodeerd. Deze methode hoeft geen eigen audiosignaal te genereren (zoals bij sonar bijvoorbeeld), en is in plaats daarvan gebaseerd op het moduleren van de reflecties van onderwatergeluiden om gegevens bit voor bit te verzenden. Deze gegevens worden vastgelegd door een externe ontvanger die de gewijzigde patronen kan ophalen, en vervolgens wordt de binaire informatie gebruikt om het beeld te reconstrueren. De auteurs schatten dat hun onderwatercamera ongeveer 100.000 keer energiezuiniger is dan zijn tegenhangers, en wekenlang kan werken.
Uiteraard bouwde het team een proof-of-concept prototype en voerde een aantal tests uit om te bewijzen dat hun methode werkte. Zo fotografeerden ze vervuiling (in de vorm van plastic flessen) bij Keyser Pond in het zuidoosten van New Hampshire en fotografeerden ze de Afrikaanse zeester (Protorster Linkley) in een “gecontroleerde omgeving met buitenverlichting”. De resolutie van de laatste afbeelding was goed genoeg om de verschillende knobbeltjes langs de vijf armen van de zeester vast te leggen.

SS. Beste et al, 2022
Het team was ook in staat om de draadloze onderwatercamera te gebruiken om de groei van een waterplant te volgen (Aponogeton ulvaceus) gedurende meerdere dagen, het detecteren en lokaliseren van visuele tags die vaak worden gebruikt voor onderwatertracking en geautomatiseerde verwerking. De camera bereikte hoge detectiesnelheden en een hoge lokalisatienauwkeurigheid tot een afstand van ongeveer 3,5 meter (ongeveer 11 en een halve voet); De auteurs suggereren dat langere detectiebereiken kunnen worden bereikt met sensoren met een hogere resolutie. Volgens tests die zijn uitgevoerd aan de Charles River in het oosten van Massachusetts, is afstand ook een factor in de energiewinning en communicatiemogelijkheden van de camera. Zoals verwacht, nemen deze twee essentiële mogelijkheden af met de afstand, hoewel de camera erin slaagde gegevens tot 40 meter (131 voet) van de ontvanger te verzenden.
Samenvattend schrijven de auteurs: “De onbeperkte, goedkope en volledig geïntegreerde aard van onze methode maakt het een wenselijke benadering van oceanische massale verspreiding.” Om hun aanpak op te schalen, zijn geavanceerdere en efficiëntere transducers nodig, evenals akoestische transmissies onder water met een hoger vermogen. Het is ook mogelijk dat men gebruik kan maken van bestaande mesh-netwerken van boeien op het oceaanoppervlak, of netwerken van onderwaterrobots zoals Argo-boeien, om energieverzamelende camera’s op afstand te bedienen.
“Een van de meest opwindende toepassingen van deze camera voor mij persoonlijk is in de context van klimaatmonitoring”, Adeeb zei:. “We bouwen klimaatmodellen, maar we missen gegevens van meer dan 95 procent van de oceaan. Deze technologie kan ons helpen nauwkeurigere klimaatmodellen te bouwen en beter te begrijpen hoe klimaatverandering de onderwaterwereld beïnvloedt.”
DOI: Natuurcommunicatie, 2022. 10.1038 / s41467-022-33223-x (Over DOI’s).

‘Reader. Furious humble travel enthusiast. Extreme food scientist. Writer. Communicator.’




